요즘 호랭이 아들 민수는 로봇 만들기에 푹 빠져 지낸다.
하기야 조막손으로 만든 로봇이 움직이는 걸 보면 나도 신기한데
저는 얼마나 신기하고 재미있을까?
처음에는 구조를 만드는 연습을 하느라 움직이지 않는 것들을 만들더니 요즘은
제법 로봇이라고 하기에 그럴듯 한 것들도 만들고 있다.
어제 집에서 만든 토끼 로봇 사진을 올려볼까 한다. ㅎ.ㅎ
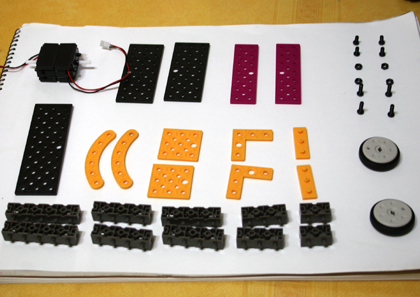
먼저, 토끼 로봇의 몸통을 만드 재료 준비하기다.
콘트롤 가능한 모터 두 개와 바퀴, 프레임, 볼트 등이 재료다.

준비한 재료로 책을 보고 뚝딱뚝딱 움직이는 조막손이 칵 깨물고 싶다. 제 자식이 하는 일이야 뭘 봐도 그렇지 않은가. ㅋㅋㅋ
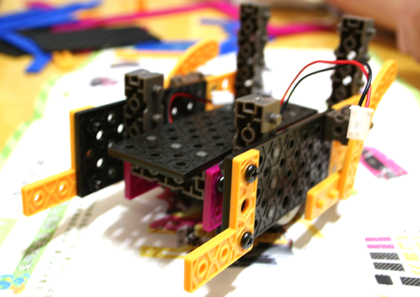
이게 토끼의 본체. 앞쪽의 노란색 ㄱ모양 프레임이 앞다리, 뒤쪽 노란 프레임이 뒷다리다.
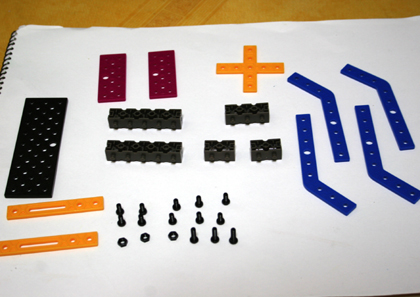
이번에는 토끼 얼굴과 척추를 만들 재료 준비.
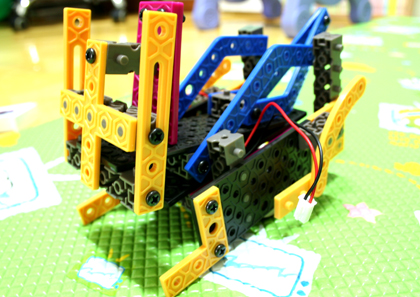
어뜨케 쫌 토끼 같으신지. 쫑긋 쫑긋 노란 귀와 +모양 얼굴.
이제 몸통은 다 만들어졌으니 눈과 뇌, 펄떡펄떡 뛰는 심장만 달면 된다.
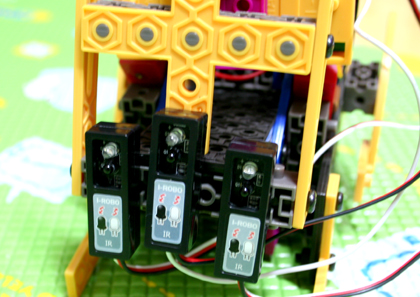
눈은 세 개의 IR 센서가 대신한다. 눈이 세 개라니. =_=;
세 개의 IR 센서는 각각 왼쪽과 오른쪽, 정면의 문체를 감지하는 역할을 한다.
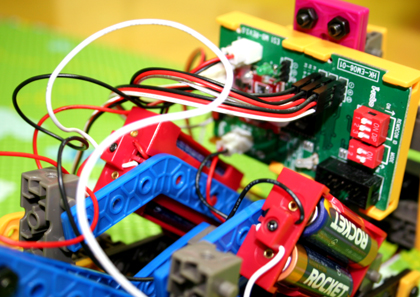
다음은 뇌를 대신해 줄 메인보드를 토끼의 머리 뒤에 고정시키고 IR센서와 모터, 펄떡펄떡 심장을 대신할 배터리를 연결한다. DIP 스위치까지 설정해 주면, 주행 중에 IR 센서가 물체를 인지한 다른 곳으로 방향을 틀어서 달아나는 토끼 로봇 완료.

이 사진은 토끼가 워낙 빠른 탓에 제대로 찍지를 못했다.
토끼가 달려가는 정면에 물체가 있으면 뒤로 돌아서 달아나고, 왼쪽에 물체가 있으면 오른쪽, 오른쪽에 물체가 있으면 왼쪽으로 돌아서 달아난다.
그런데 재미난 것은 IR 센서로 물체를 인식하다보니, 카메라 플래시를 터뜨리면 플래시 빛 때문에 토끼가 막 방향을 바꾼다는 점이다. ㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋㅋ